周期/非周期運動を、より高精度、より安全に、制御・診断する
産業用ロボットや自動機械の多くは大量生産のため繰り返し作業(周期運動)を実施します。さらにそこには、故障・摩耗・人間との接触などに起因する異常(非周期運動)も潜んでいます。これら、周期運動と非周期運動を対象とした機械システムの高精度化・安全化・異常検知を実現する制御・診断アルゴリズムの研究開発を行っています。
NEDO 官民による若手研究者発掘支援事業 「若サポ」
若手研究者産学連携プラットフォーム
このシーズに
問い合わせる
ビジョン
産業用ロボットや自動機械の多くは大量生産のため繰り返し作業(周期運動)を実施します。さらにそこには、故障・摩耗・人間との接触などに起因する異常(非周期運動)も潜んでいます。これら、周期運動と非周期運動を対象とした機械システムの高精度化・安全化・異常検知を実現する制御・診断アルゴリズムの研究開発を行っています。
最終用途例
APPLICATION
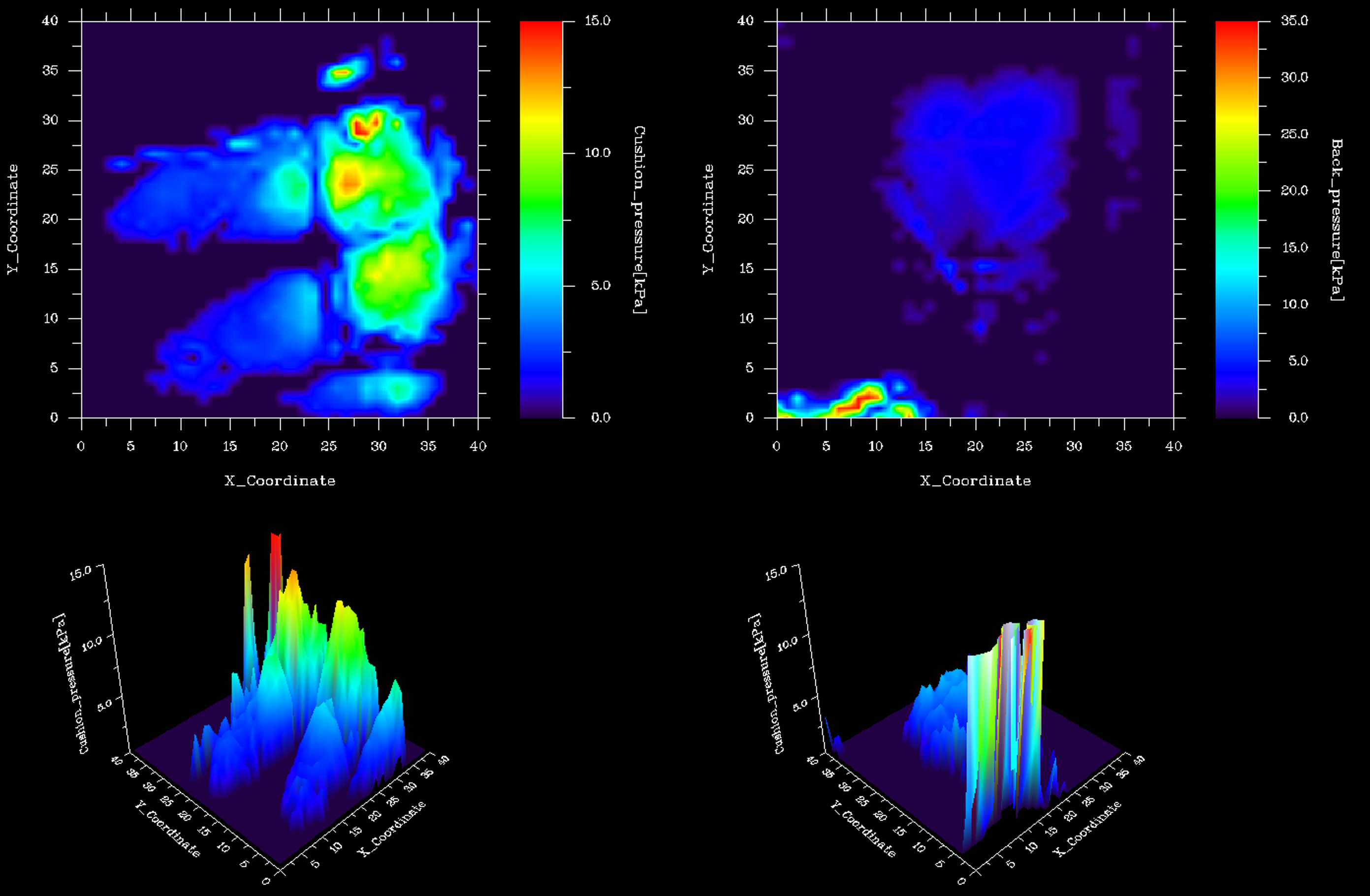
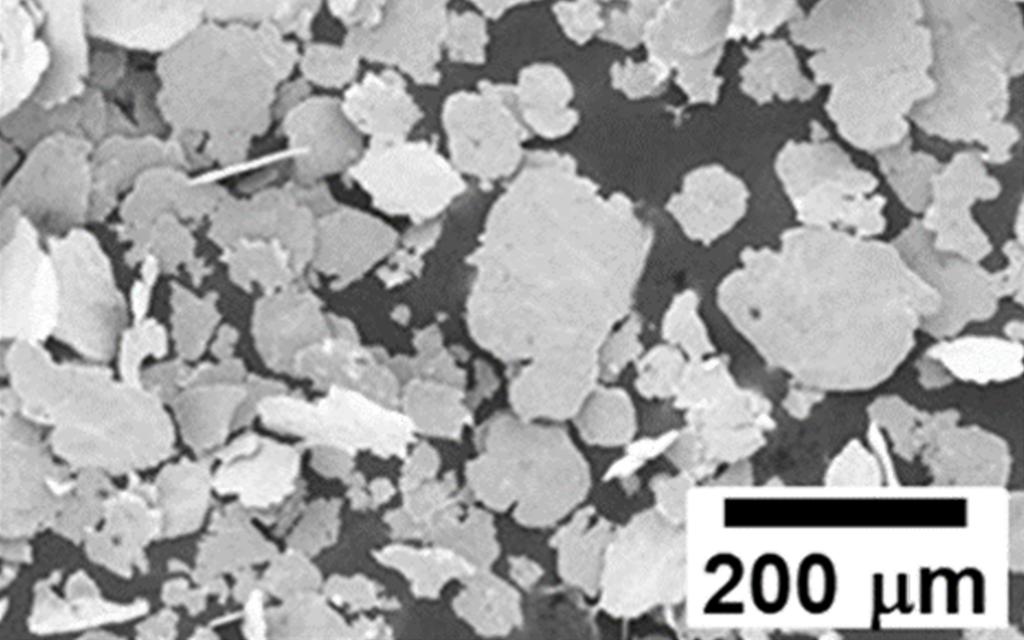
繰り返し作業する自動機械の位置決め精度を悪化させる周期外乱(振動)の問題へ、周期外乱を推定・補償する制御アルゴリズムによりこれを解決します。
APPLICATION
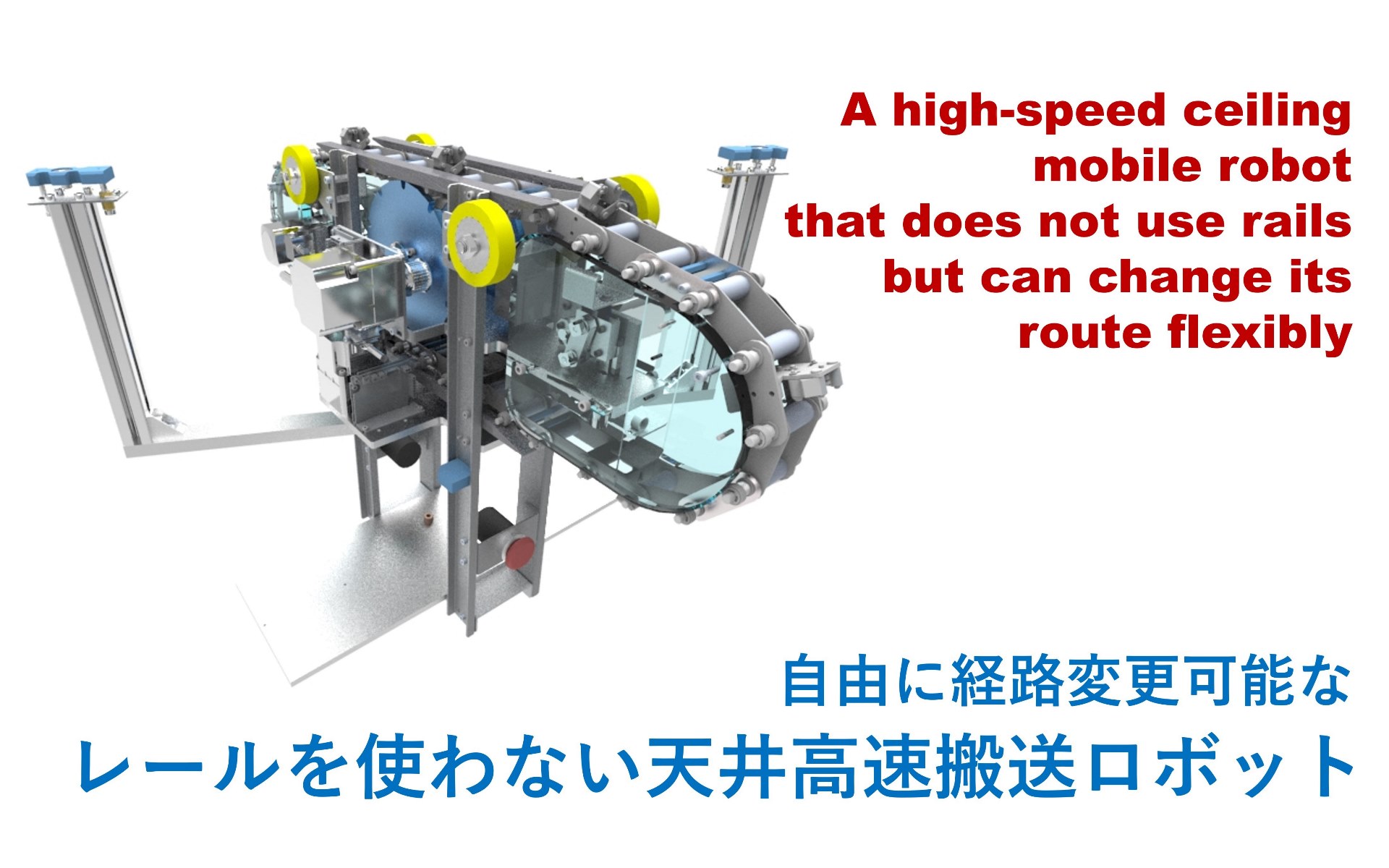
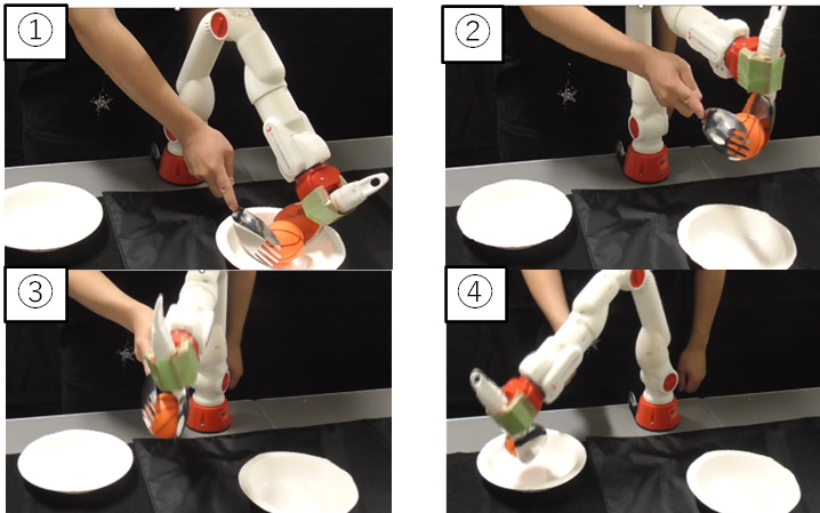
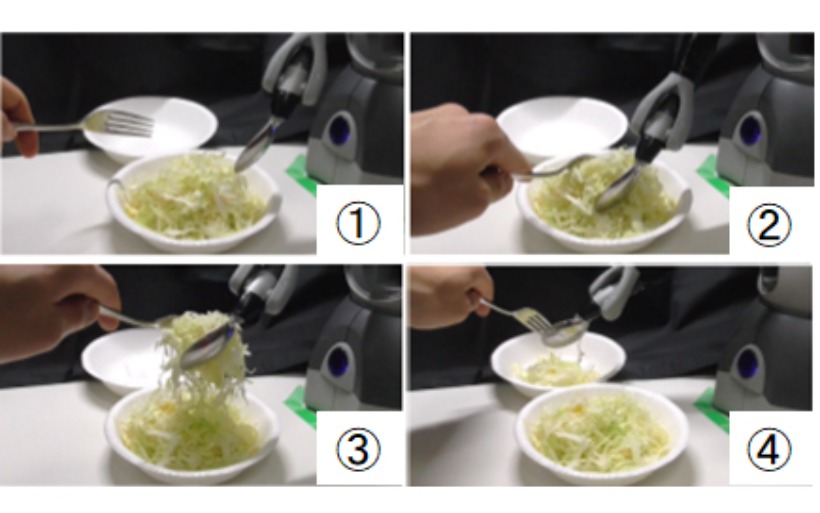
繰り返し作業(周期運動)へ精密な位置制御を、人間との突発的な接触(非周期運動)へ安全な力制御を実現することで、協働ロボットへ精密かつ安全な運動を実現します。
APPLICATION
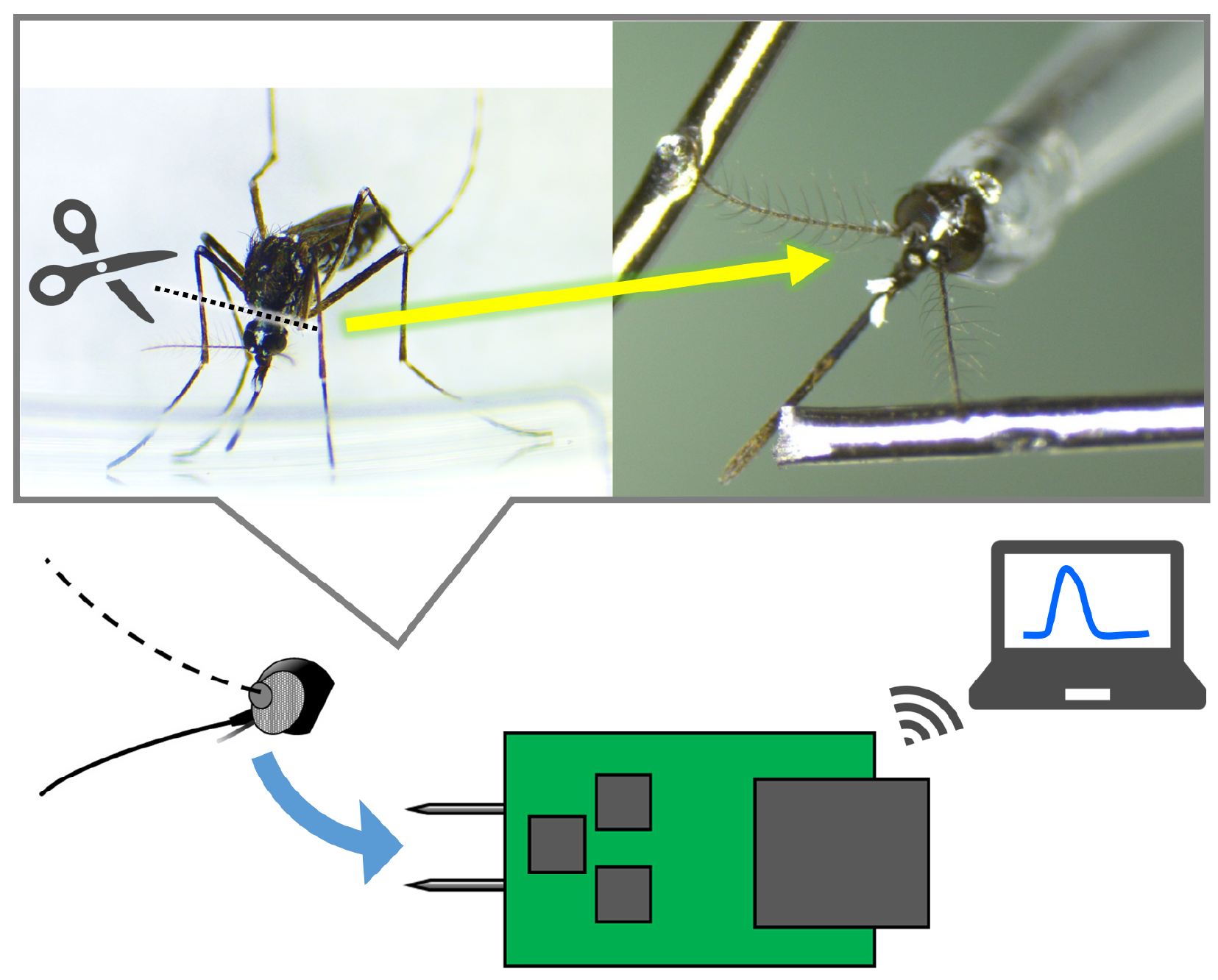
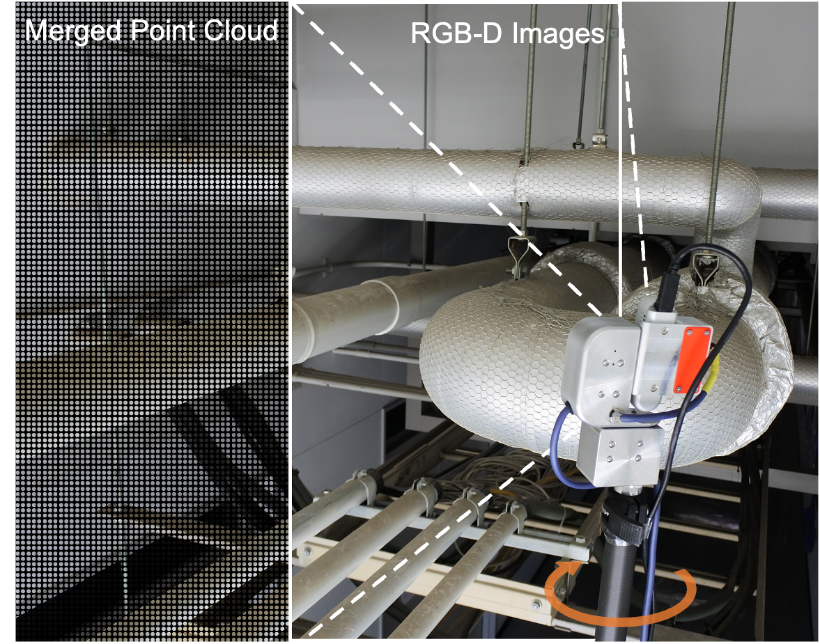
大量生産された製品の押し込み検査や繰り返し運転する機械から計測される力より、正常な周期力と異常な非周期力を分離することで、異常品や異常運転をリアルタイム検出します。
強み
運動に潜む周期現象と非周期現象を捉える問題発見と、周期/非周期の性質を活用したアルゴリズム開発による、ユニークな周期/非周期の問題解決を提供します。
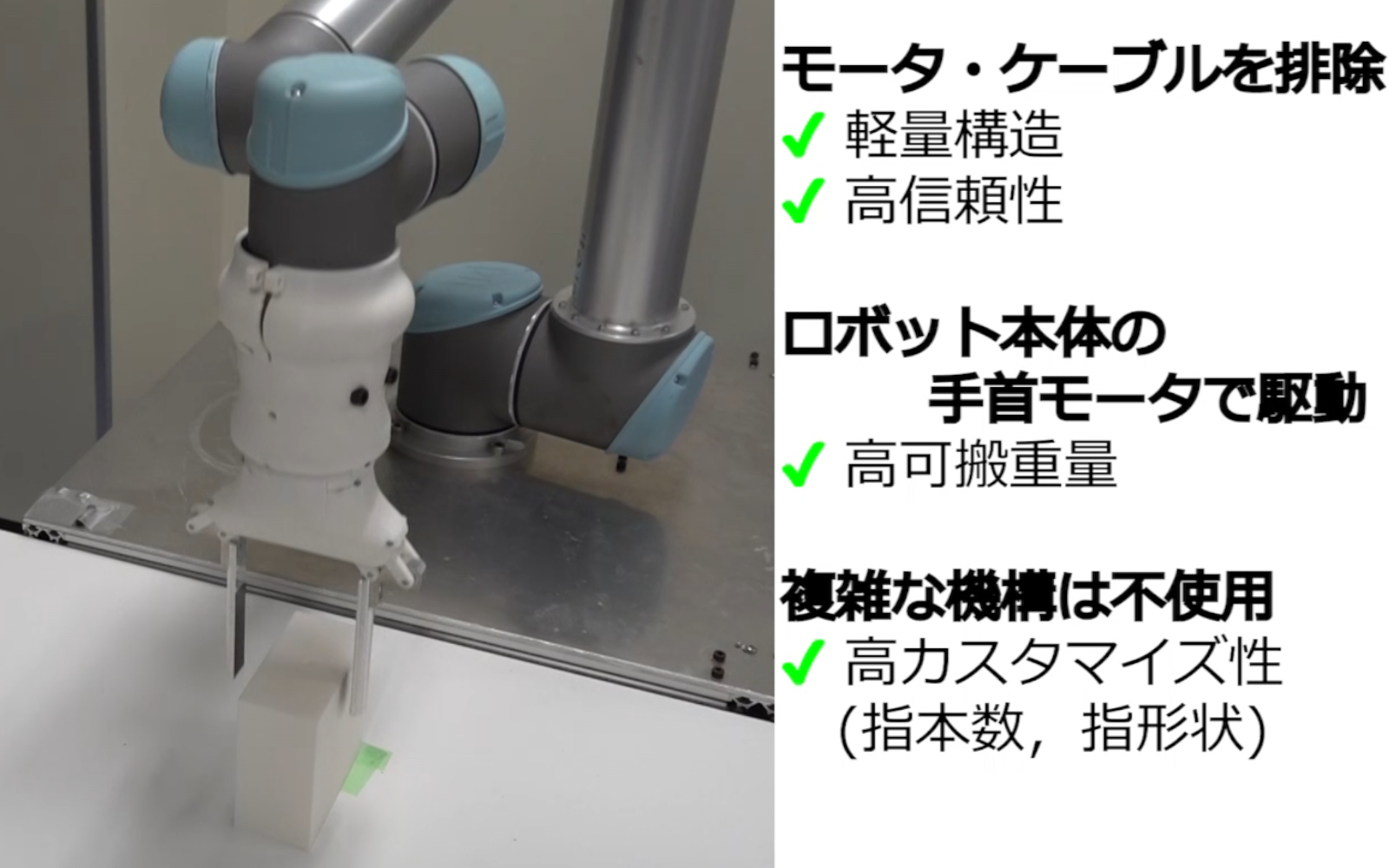
可能な限り既存の機構や運転環境(ハードウェア)を保存しつつ、機械システムの運動を取り巻く問題はアルゴリズム(ソフトウェア)によって解決します。
リアルタイムな制御・診断が、機械システムを取り巻くその瞬間の問題へ、その瞬間に対応します。
テクノロジー
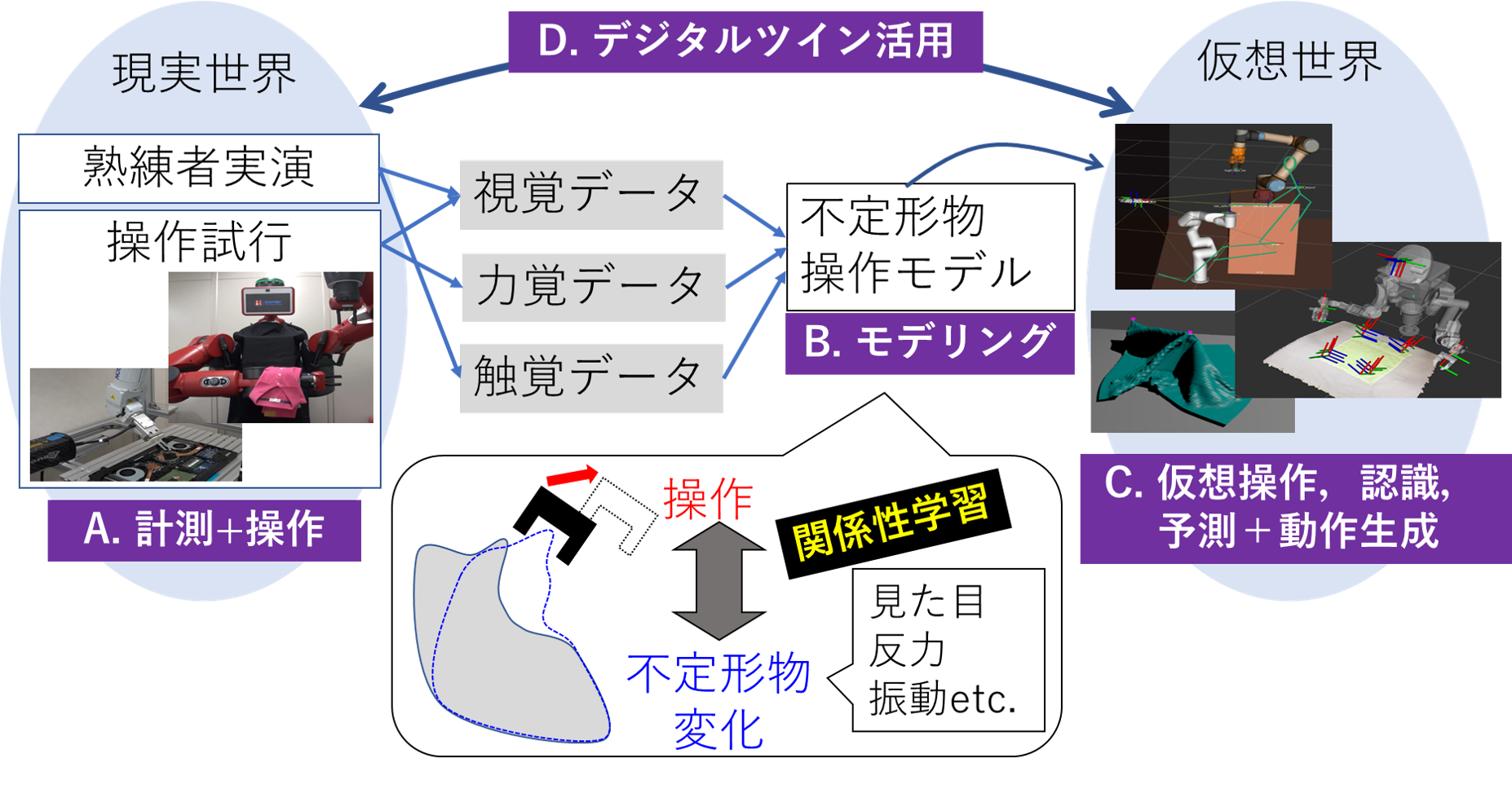
運動に潜在する周期運動と非周期運動を制御・診断するには、まず、位置・速度・加速度・力といった運動に関する信号を周期信号と非周期信号へ分離しなければなりません。この分離の要となるのは、村松がこれまでの研究で独自に発明した「周期/非周期分離フィルタ」です。この分離フィルタを用いることにより、あらゆる周期運動と非周期運動の制御・診断が実現されます。
共同研究仮説
既存の機械システムを対象として、上記の「周期外乱の推定・補償よる精密位置決め」、「周期運動の精密制御と非周期運動の安全制御」、「異常非周期力診断」といった研究開発を実施します。
産業用機械やロボットのハードウェアから共に開発していきましょう。そして、開発したハードウェアへ制御・診断のアルゴリズムを実装します。
研究者
2020年 3月 慶應義塾大学大学院 理工学研究科 後期博士課程 修了
2020年 4月 日本学術振興会 特別研究員(PD)
2020年 7月 広島大学 機械工学プログラム 助教
2024年10月 広島大学 機械工学プログラム 准教授
ホームページ https://mdl.hiroshima-u.ac.jp/muramatsu/