2020年度公募
seeds-0968 -
【関東】
模倣学習を用いたロボットによる高速汎用物体操作
VISIONビジョン
このシーズに
問い合わせる
VISION
ビジョン
柔軟物や不定形物をも操作可能なロボットのマニピュレーション技術
人間並みに速く、環境変動への対応や人間との協調も可能な物体操作技能を、数十回程度の動作教示で獲得
USE CASE
最終用途例
人間にしかできなかった物体操作をロボットが代替
USE CASE 01バリ取り、研磨
APPLICATION
人間の手作業を必要とする最終仕上げ加工を機械化
現在、加工機では取り除けないような細かいバリなどは手作業で取り除いています。これを自動化できます。
USE CASE 02ピッキング
APPLICATION
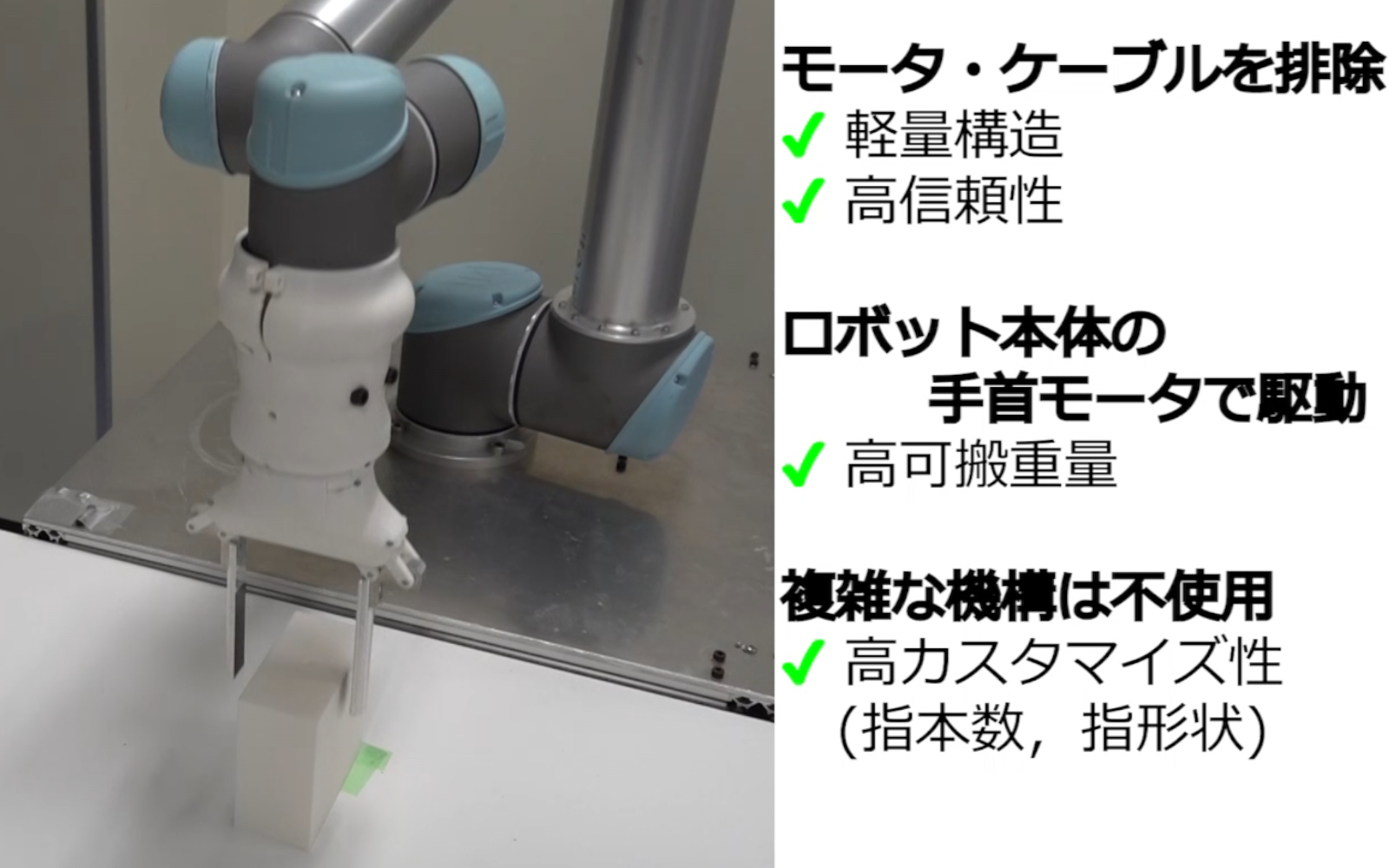
柔軟物や不定形物の操作をハンドの変更不要で実現
食品などの柔軟物や不定形物のピッキングのためには専用のハンドやツールを用いることが多くあります。しかし、本技術を使うと一つのハンドで多様な物体を操作できるようになるため、特別なハードウェアが不要になります。
USE CASE 03組立作業
APPLICATION
多様な物体の接触制御が必要な組み立ても容易に
組立作業では多くの部品を接触させながら制御する必要があります。これは非常に困難でこれまでは人の手作業に頼らざるを得なかったのです。本技術を用いればこれも自動化できるようになります。
STRENGTHS
強み
高速動作と適応能力を両立
STRENGTHS 01
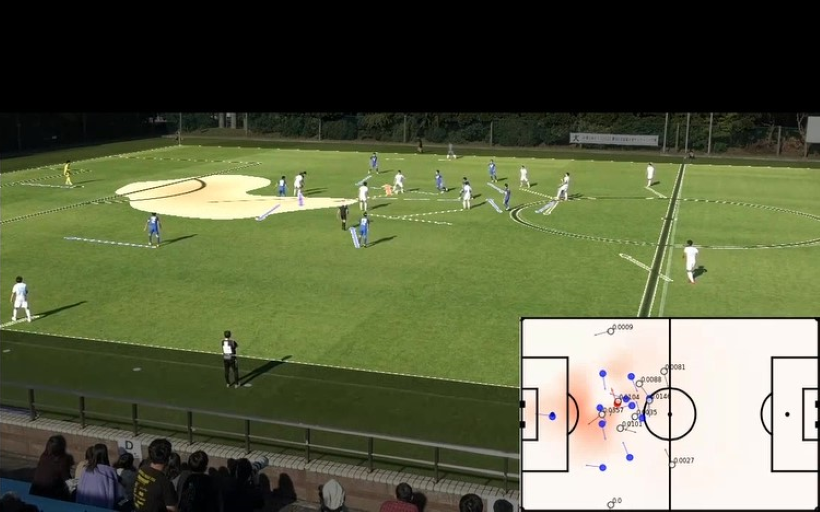
人間並みの速度で環境の変動に適応する動作が可能
速く動くためには環境の動的な力を制御する必要があります。環境が変動するとその影響はさらに顕著になります。本技術はこのような早い力の変動に対応することができます。
STRENGTHS 02
まるで人間であるかのような動作を実現
AIを使ったロボット制御技術は広がりつつありますが、人間と比較して半分以下の速度でしか動けないものか、環境に対する適応能力が低いものばかりでした。これら2つを初めて両立し人間並みの動作に成功したのが本技術です。
TECHNOLOGY
テクノロジー
人間の遠隔操作技術を真似る模倣学習
PRESENTATION
共同研究仮説
どうしても機械化できない人間の技能を機械化します
共同研究仮説01
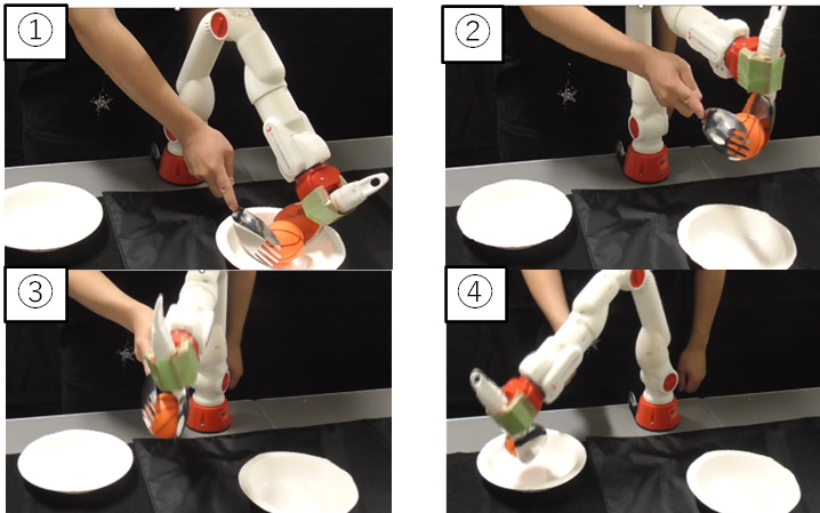
遠隔操作時の人間の物体操作技能をロボットに模倣
ロボットが未知対象物を人間並の速度で操作できます
消しゴムを用いた字消、書字、人間との協調作業、定規を用いた描線など、簡単なデモンストレーションをしています。初見の環境や道具であっても、人間並みの速度で適応していることがわかります。
RESEARCHER
研究者
境野 翔
筑波大学システム情報系
経歴
2011 年3 月慶應義塾大学大学院理工学研究科総合デザイン工学専攻博士課程修了。2011年4 月から2019 年3 月まで、埼玉大学工学部電気電子システム工学科助教。2019 年4 月より、現職、筑波大学システム情報系准教授。2011 年、2020年電気学会産業応用部門誌論文賞受賞。2020年日本ロボット学会Advanced Robotics Excellent Paper Award受賞。博士(工学)。主としてロボティクス、モーションコントロール、ハプティクスの研究に従事。
https://mclab.iit.tsukuba.ac.jp/

){kind=link}
){kind=link}