製品製造等におけるボトルネック工程を自動化し、人や環境にかかる負荷を軽減
持続可能な社会の実現のため、製品製造やリサイクルの現場では様々な変革が求められている。本研究開発では、ケーブル・ゴム・布・革などの不定形物を操作の自動化を容易にするための開発環境を提供することを目指す。そして、次の展開に貢献する。①単純作業の無人化を図り、人に合わせた作業環境の構築や空熱環境の運用に関する負荷を減らす、②分解作業や組み立て作業での人的ミスを減らし、無駄を省いて生産性を向上させる。
NEDO 官民による若手研究者発掘支援事業 「若サポ」
若手研究者産学連携プラットフォーム
このシーズに
問い合わせる
ビジョン
持続可能な社会の実現のため、製品製造やリサイクルの現場では様々な変革が求められている。本研究開発では、ケーブル・ゴム・布・革などの不定形物を操作の自動化を容易にするための開発環境を提供することを目指す。そして、次の展開に貢献する。①単純作業の無人化を図り、人に合わせた作業環境の構築や空熱環境の運用に関する負荷を減らす、②分解作業や組み立て作業での人的ミスを減らし、無駄を省いて生産性を向上させる。
最終用途例
APPLICATION
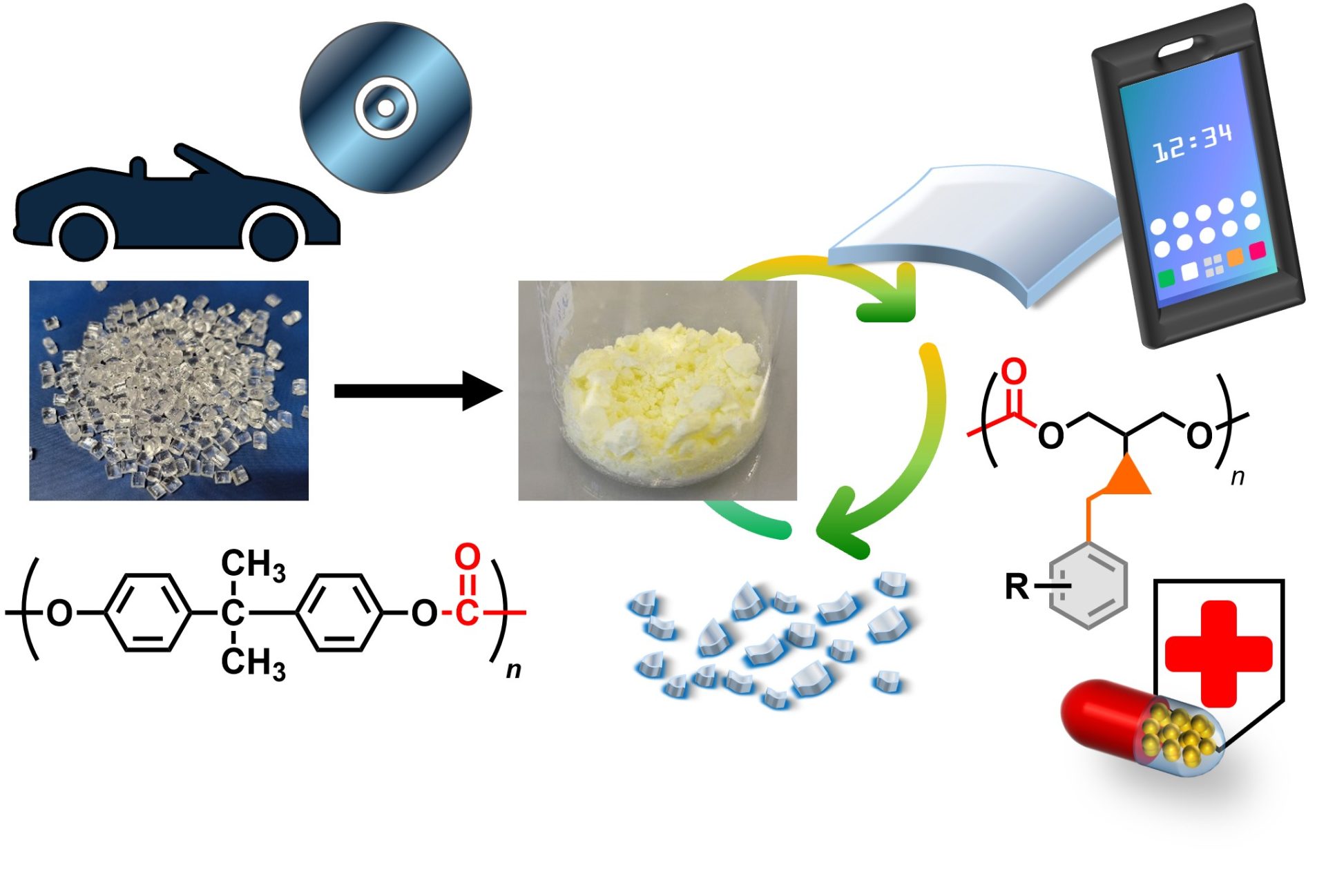
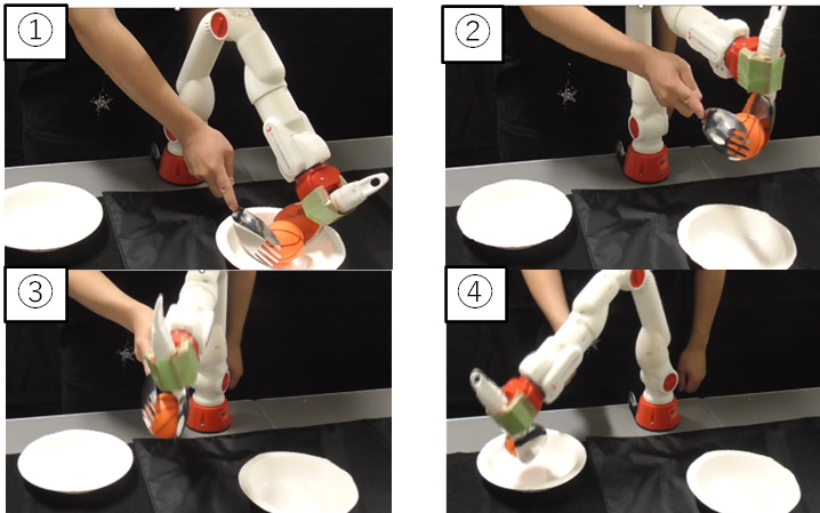
自動車や電化製品にはケーブルや布、ゴムカバーなどの不定形物が多く組み込まれている。これらに関する作業を適切にシミュレートすることで、自動化に必要な試行錯誤の多くを実機を使わずにできるようにする。
強み
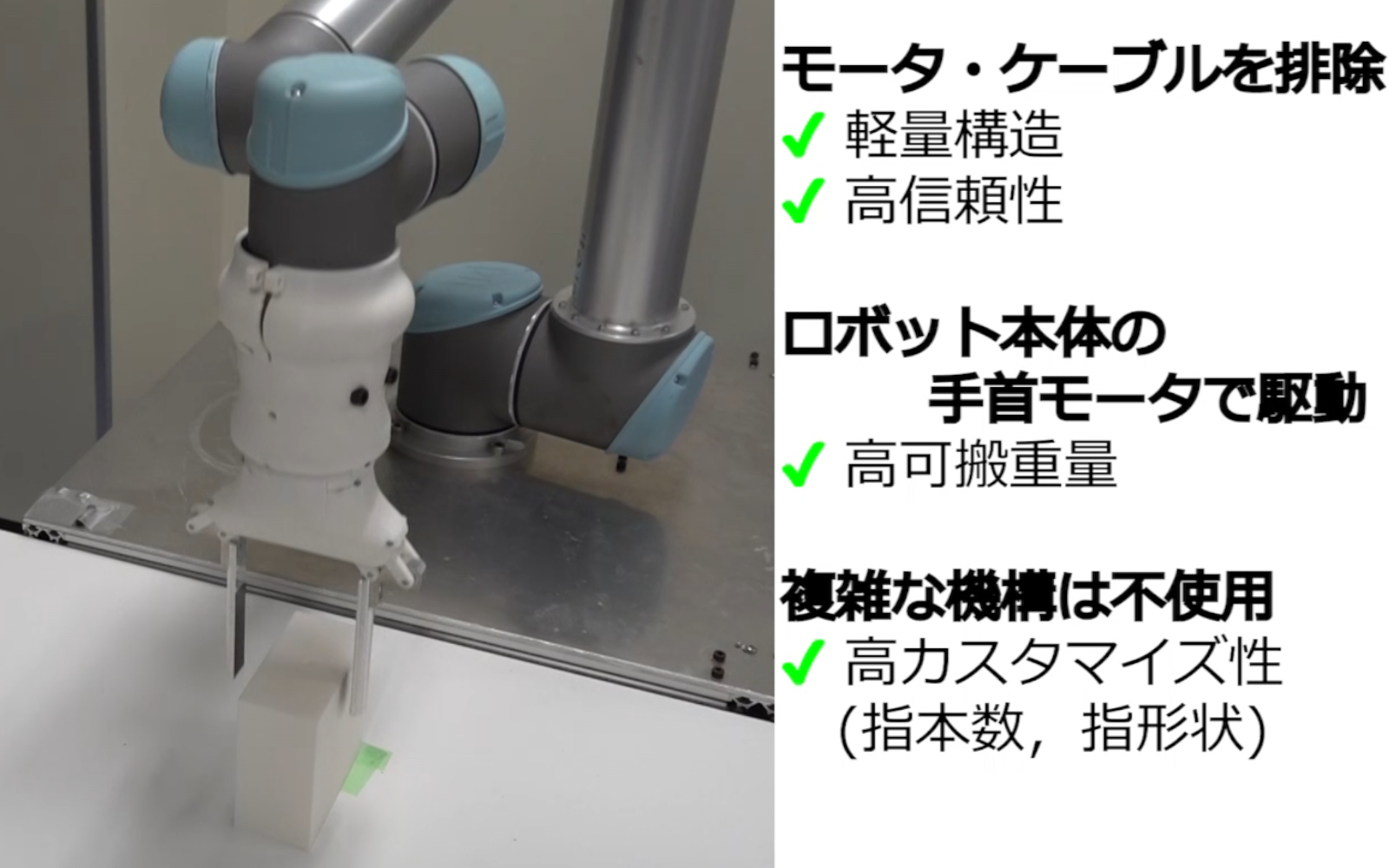
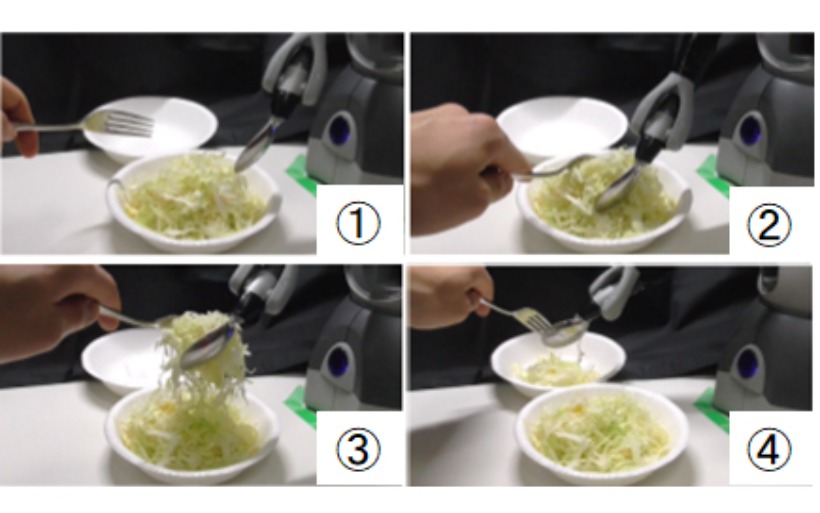
「操作を加える」と「不定形物の変化する」ことの関係をシミュレータで適切に表現する。もし従来ハードウェアでは適切な操作を加えることが難しい場合は、新たなハードウェアも考案する。
テクノロジー
以下を実現し、不定形物作業の自動化にかかる手間を削減可能にする。
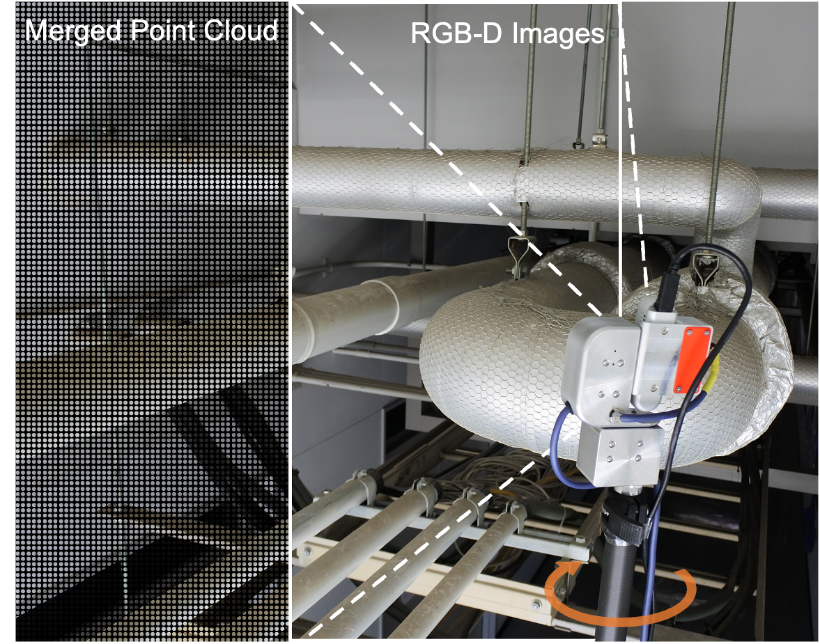
•外力や摩擦が働く状況下での不定形物の状態を適切に表現する。その表現を用いて不定形物の状態を正確に推定可能にする。布製品や自動車部品の解体などを対象として、求められる精度で不定形物の状態を把握する。
•外力や摩擦が働いた不定形物のふるまいを正確に模擬できる物理シミュレーション環境を構築する。そのシミュレータ内で不定形物操作を学習可能にし、その結果をもとに実ロボットに不定形物操作を破綻せず実行させる。
共同研究仮説
単一のパッケージで多くの自動化に対応できるように実装を一般化
大学側:不定形物操作の計測やモデリング手法を新たに提案・検証
企業側:大学側の成果を引き取り企業独自のデジタルツイン環境を拡張
イベント動画
研究者
研究室Webページ:http://ais.shinshu-u.ac.jp/ja/