2022年度公募
seeds-3096 -
【東海】
移動体の定位を10cmオーダーで実現するメンテナンスフリー屋内定位インフラシステム
VISIONビジョン
このシーズに
問い合わせる
VISION
ビジョン
採算性に優れる定位システムの実現により、高度情報基盤を築き自動化・効率化を促進します
USE CASE
最終用途例
生産圏では自動搬送や動態分析、生活圏では高度IoTサービス
USE CASE 01中小規模生産現場に低コストな定位システムを導入し、自動搬送ロボットを導入する
APPLICATION
既存技術に統合し、ロボット適用範囲を拡大
定位システムを導入したエリアでは、クライアント登録した移動ロボットは数秒間隔で自身の大域位置座標を受け取ります。AGV未敷設区間、LiDARやRTK-GNSSの不得意エリアへ適用範囲を広げます。
USE CASE 02クライアントモジュールを取り付けたものを数秒間隔でトラッキングします
APPLICATION
スタッフのハットに取り付けて、業務状態の計測
クライアントモジュールをイベントスタッフや医療スタッフのハットに取り付けるだけ。数時間~数か月の中長期に渡ってスタッフの位置を10cmオーダーで記録・保存し、業務分析・改善に役立てます。
USE CASE 03シェアリングエコノミーの活性化
APPLICATION
所有物のシェア、配達労働力のシェア
シェアリングエコノミーを支えるのはトレーサビリティ。注文したハンバーガーがどこを通過中かさえ分かれば他人に配達をお願いできるように、位置さえ分かれば所有物の貸し借りや配達依頼市場はもっと拡大します。
STRENGTHS
強み
より小さな導入コストと運用コストで物体搬送の自動化ができる
STRENGTHS 01
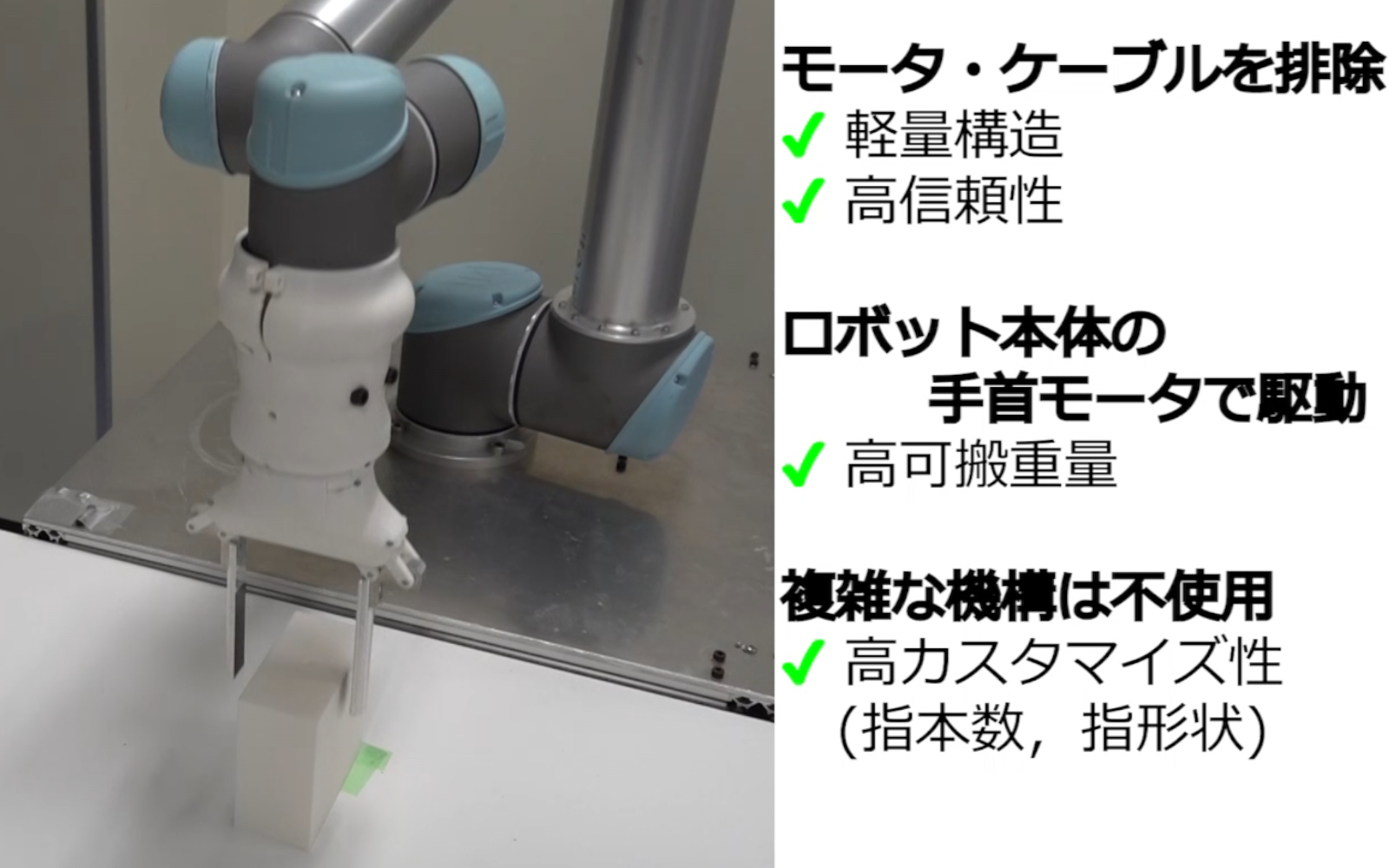
クライアントとなる移動体にはカメラと通信機能だけあればよい
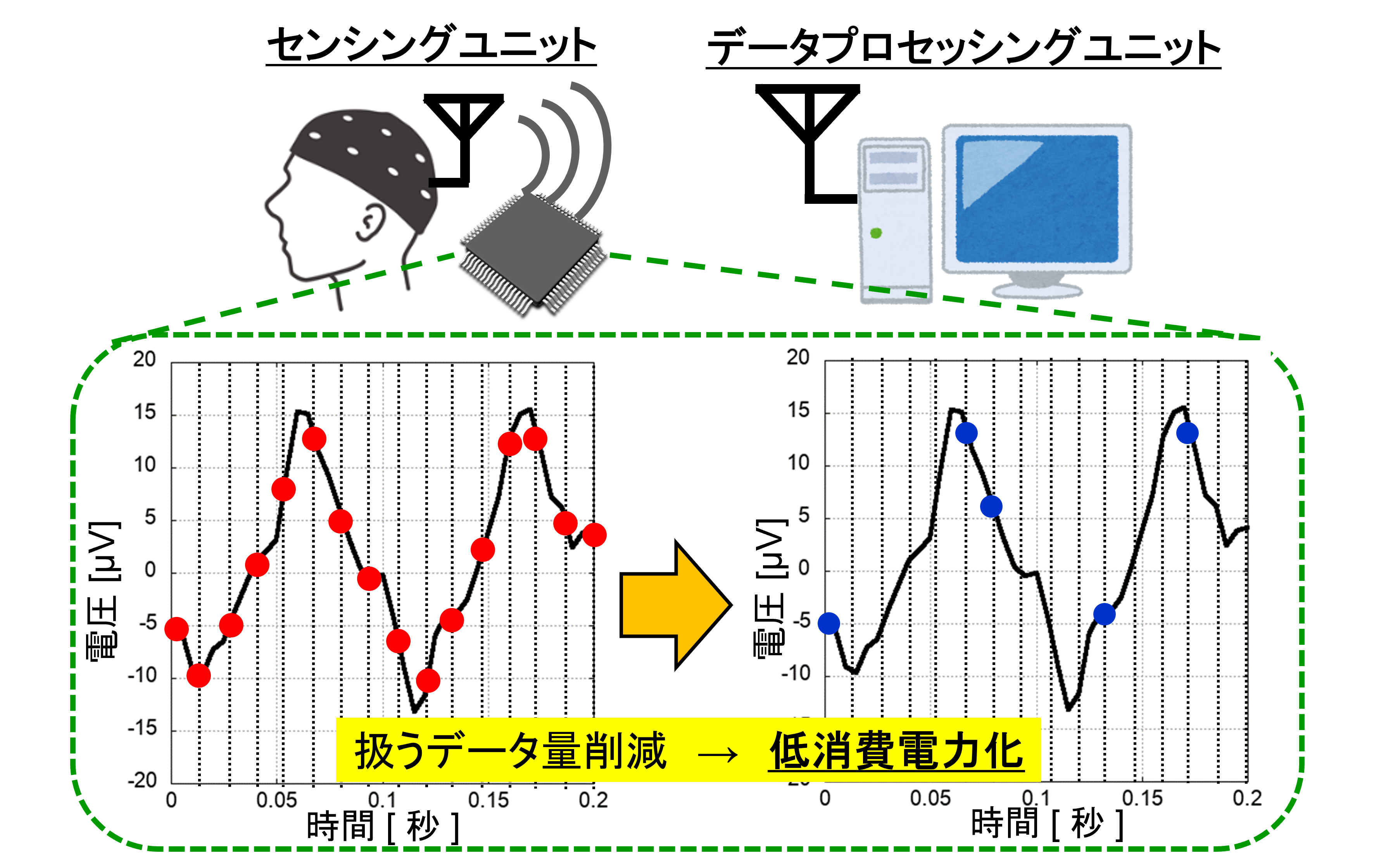
移動体定位のための位置解決演算は高負荷な処理です。この処理をすべてサーバ側にまかせるためにクライアントはセンシングデータを送信するだけでよく、空いたリソースをより高度なサービスのために利用できます。
doi.org/10.18494/SAM.2020.2678
TECHNOLOGY
テクノロジー
3D CAD モデルから任意の密度でDB画像群を生成、GPU並列演算で高速に照合
TECHNOLOGY 01
3D CAD モデルから任意の密度でDB画像群を生成
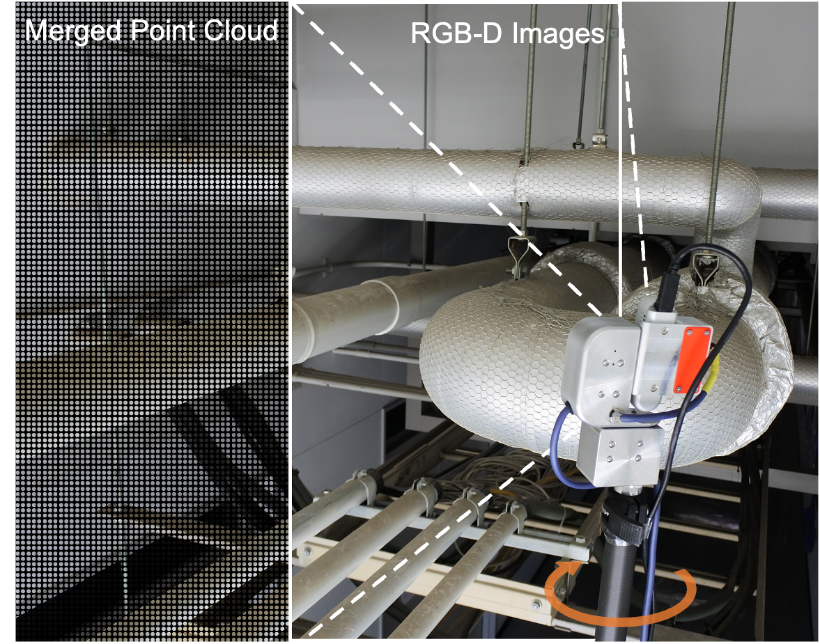
建築物の3D CADモデルを事前マップとして利用します。建築物の壁、床、天井、ドア、窓の境界となる構造物の線分を視覚特徴として任意の視点座標で透視投影画像を生成します。これを対象とする空間の範囲で大量に生成して座標値付きの画像DBを構成します。原理的に(x,y,z,θ,Φ,ψ)の6自由度定位が可能で、画像の生成間隔を密にとれば精度はいくらでも向上できます。
doi.org/10.18494/SAM.2020.2678
近年、BIMを事前マップとして精度の高い位置推定を目指す研究が注目されはじめていますが精度は1mオーダー程度で、まだまだ本手法に分があります。
TECHNOLOGY 02
GPU並列演算で高速に照合
クライアントがアップロードしたセンシング画像を線分検出し、そしてそれを線分クエリ画像としてDB内のすべての画像と照合します。GPUの並列演算のために照合処理は高速で、例えば20万枚のDB画像から最も類似度の大きい1枚の画像を出力するのに1秒とかかりません。今は全探索を基本としていますが、探索の効率化アルゴリズムを実装すれば検索時間はもっともっと縮められます。
doi.org/10.18494/SAM.2020.2678
PRESENTATION
共同研究仮説
再度の産業活性化、市民のQoL向上を目指しましょう
共同研究仮説01
クラウド型定位システムを利用する自動搬送ロボットの開発
クラウド型定位システムの現場向けローカライズ改良
物流自動化、Third Party Logistics、製造業生産ライン設計・構築、を扱う企業との共同研究を望みます。本研究の定位技術を前提とした搬送ロボットを試作し、様々な製造現場、物流現場での実証実験を行うことを希望しています。対象とする現場の特徴を活かし、定位技術をローカライズします。
移動体通信やセキュリティに関連する企業、地方行政のEBPMにアプローチできる企業との共同研究を望みます。人や物体のトラッキングはQoL向上につながる一方でリスクもあります。本定位システムを前提とする大学内ハッカソンや市民向けイベントの開催を通して、長期的な視点で社会受容性を検証していきたいです。
EVENT MOVIE
イベント動画
RESEARCHER
研究者
高橋淳二
豊橋技術科学大学(准教授)
経歴
2010年3月に博士(工、名古屋大学)を取得後、筑波大学、名古屋大学、青山学院大学、鹿児島大学を経て2022年4月から現職。ロボティクス、メカトロニクス、人支援技術、情報ネットワークの分野で論文発表。Best Paper Award at IEEE DARS2008、日本ロボット学会論文賞、FA財団論文賞、SICE中部支部研究奨励賞など受賞。


){kind=link}
){kind=link}