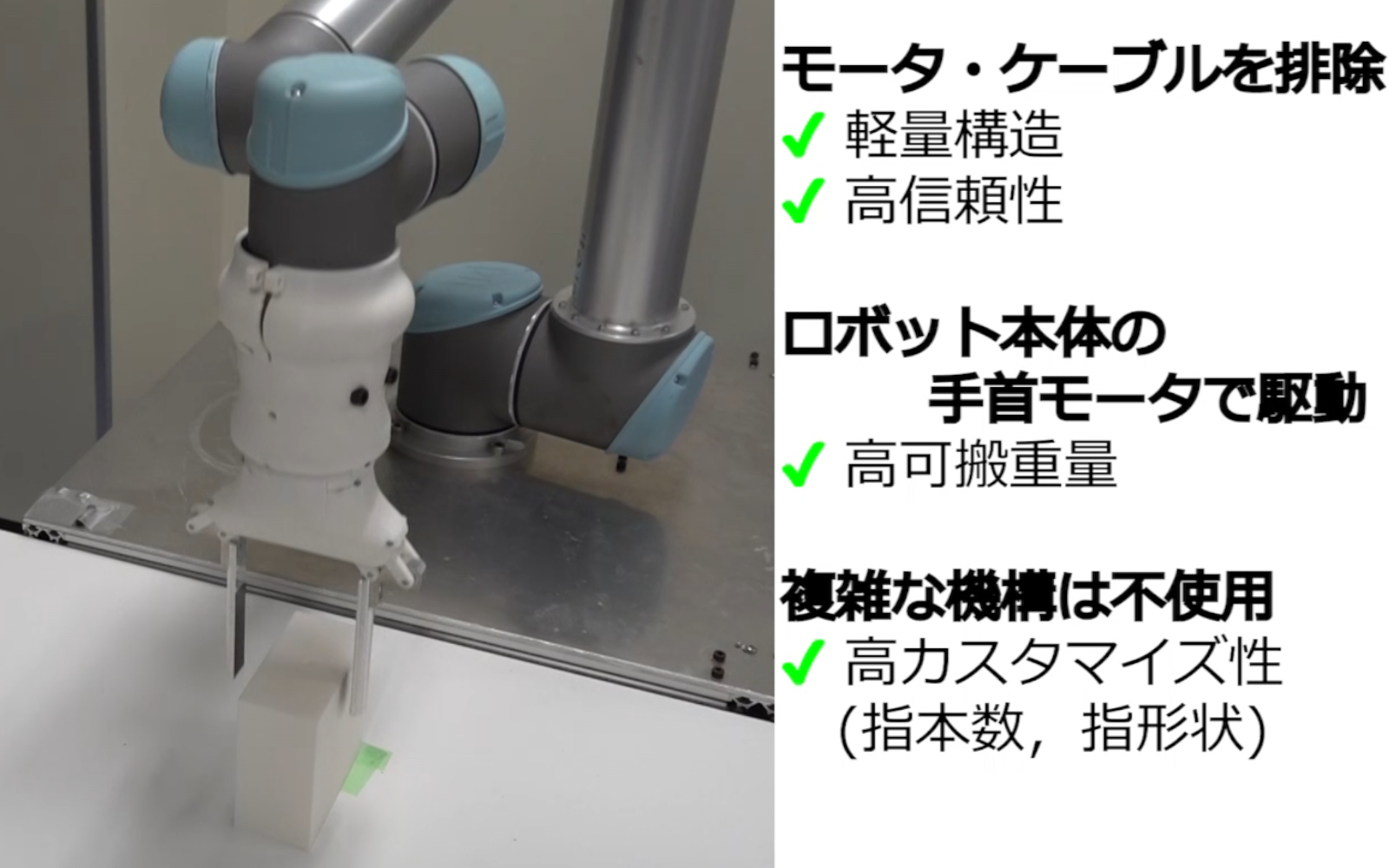
ロボットを介さず普段と同じ姿勢での教示を実現
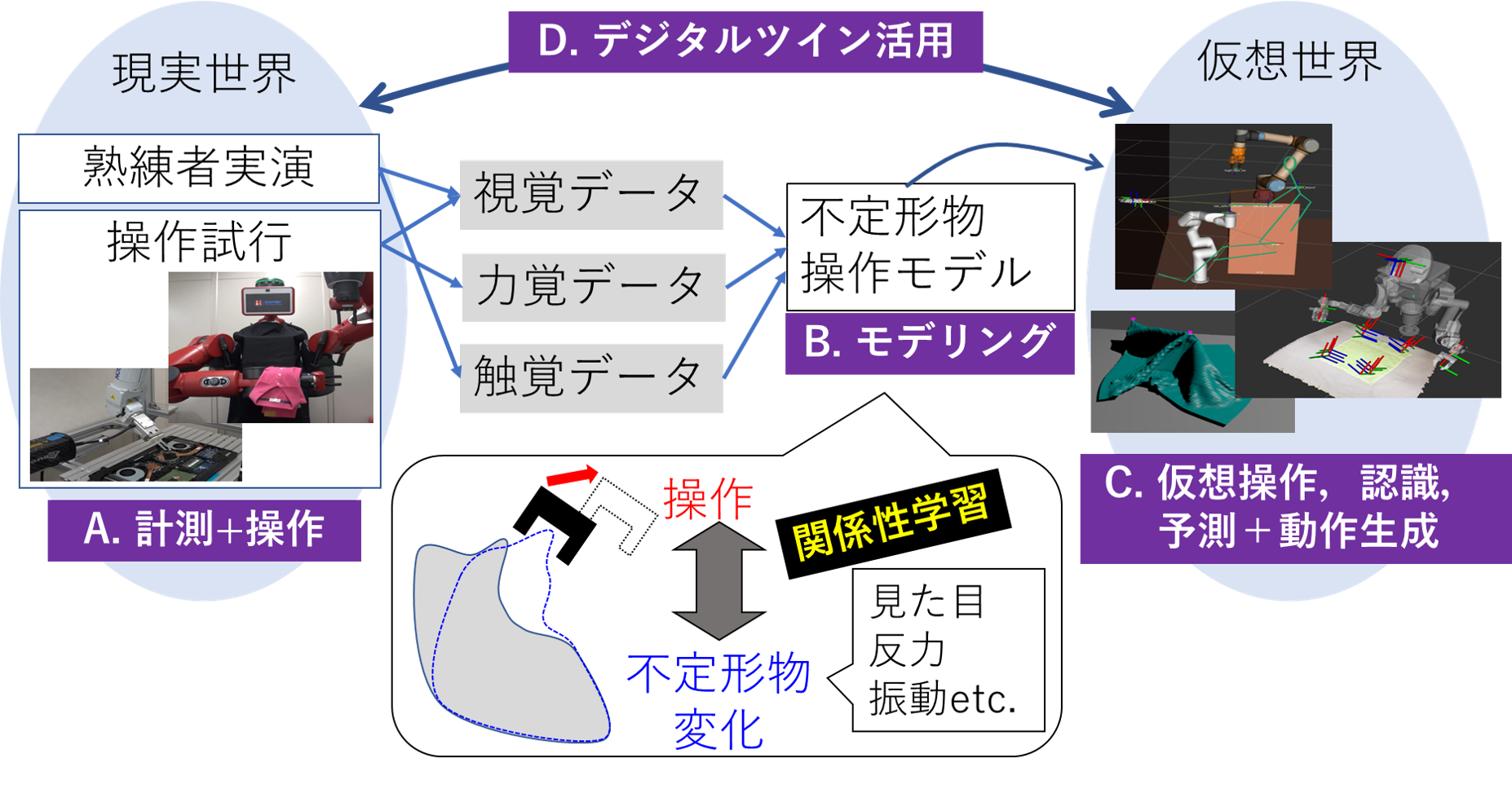
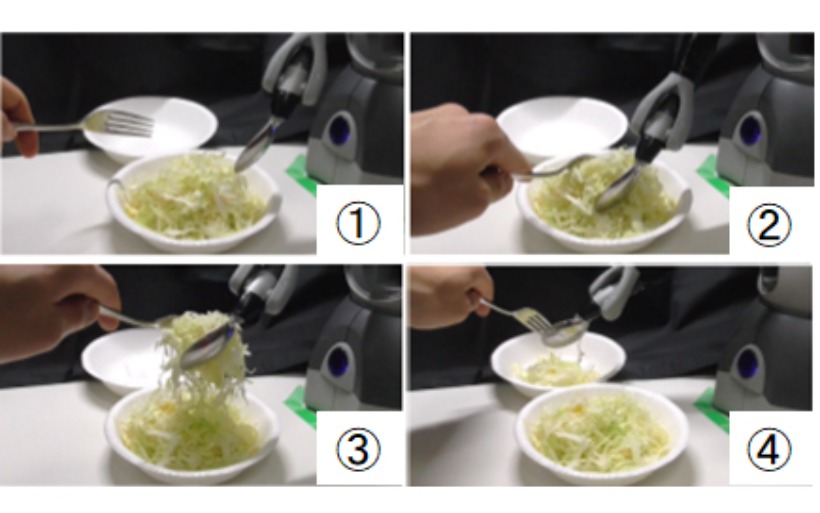
協働ロボットは直感的な教示を実現し、自動化の適用範囲を拡張した。しかし普段の作業と違う姿勢を強いられることやロボットを介することによる動作の劣化が教示できるタスクの範囲を限定していた。本提案技術を導入することによってこれらの問題を解決し、難易度の高いタスクや多品種少量生産で教示に時間をかけられないタスクの教示を可能にする教示装置を開発する。
若手研究者産学連携
プラットフォーム
このシーズに
問い合わせる
ビジョン
協働ロボットは直感的な教示を実現し、自動化の適用範囲を拡張した。しかし普段の作業と違う姿勢を強いられることやロボットを介することによる動作の劣化が教示できるタスクの範囲を限定していた。本提案技術を導入することによってこれらの問題を解決し、難易度の高いタスクや多品種少量生産で教示に時間をかけられないタスクの教示を可能にする教示装置を開発する。
最終用途例
APPLICATION
教示ツールを介して配線コネクタを教示者が持ち、接続する。コネクタの把持や接続の時に生じた力と位置は力センサとモーションキャプチャで記録される。その値をロボットで指令値として与えることで教示が達成される。
APPLICATION
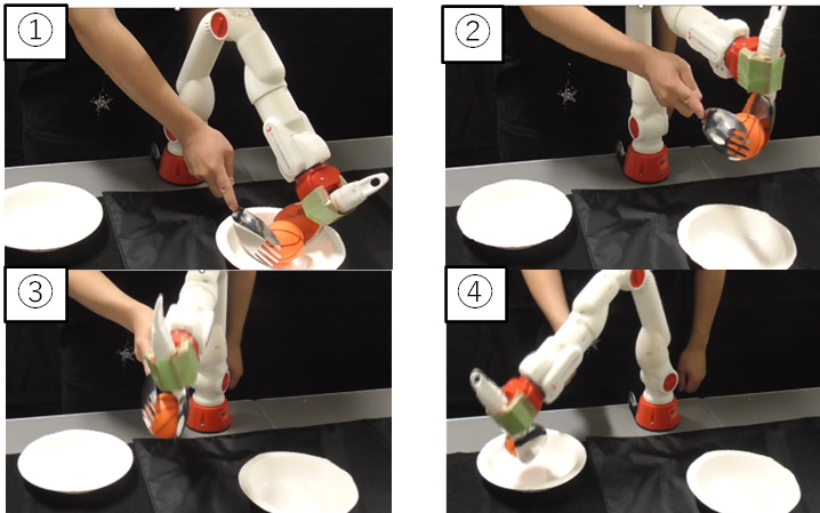
インパクトドライバーやスパナなどの工具を教示者が持ち、普段と同じ姿勢で組み立てを行う。その力と位置はロボットを使わずに力覚センサ及びモーションキャプチャによって記録することが可能である。
APPLICATION
グラインダーやポリッシャーと言った研磨ツールを教示者が持ち、普段と同じ姿勢で研磨する。その力と位置はロボットを使わずに力覚センサ及びモーションキャプチャによって記録することが可能である。
強み
ロボットを介した直接教示では普段と違う姿勢での作業になり、かつ組み立て部品や道具をロボットを介して操作するので作業の質が劣化します。本技術では普段と同じ姿勢でかつロボットを介さず作業をするため、作業の質が劣化しません。
テクノロジー
ロボットの力制御や力計測、マニピュレーションに関する研究で2020年以降に国際論文誌に17編(うち12編がインパクトファクターが3以上の論文誌)の論文を発表し、査読付き国際会議にも22件発表するなど、精力的に活動しています。その内容は3件の国際論文賞、国際会議の賞を受賞するなど高い評価を得ています。
共同研究仮説
難易度が高い、もしくは多品種少量生産のために人手での組立・研磨に頼らざるを得ない分野での自動化を促進します。連携先としてはロボットメーカを想定しています。
イベント動画
研究者
2006 年 3 月慶應義塾大学理工学研究科総合デザイン工学専攻後期博士課程修了.同年 4 月東京理科大学工学部第一部機械工学科嘱託助手.2007 年 4 月埼玉大学大学院理工学研究科助教.2012 年 3 月より同准教授.博士 (工学).2006,2007 年度ファナック FA ロボット財団論文賞,2020年度Advanced Robotics Excellent Paper Award 等を受賞.主としてロボティクス,モーションコントロールの研究に従事.